Overcurrent protection of motors is a threefold problem involving normal starting currents, stalled rotors, and running overloads.
Many motors draw starting currents several times their full-load ratings, and because of the transient nature of these currents no harm is done to the motors nor any part of the electrical system.
In most applications motors are selected which have a horse power rating equal to the power required by the application under normal conditions; and since motors are capable of carrying overloads for short periods without excessive heating, a properly designed and selected over-current protective device makes this temporary over-load capacity available.
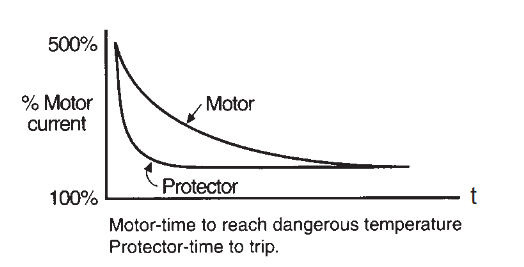
The above chart shows the inverse-time characteristics of motors and protective devices. When these curves coincide the entire motor capacity becomes available. Whenever the protector curve moves to the right of the motor curve the motor is inadequately protected. A protector curve to the left gives a margin of safety.
Non time delay fuses have time-current curves which cross the motor curve, but time-delay fuses (such as Ferraz Amp-Trap 2000 fuses or TRI-ONIC fuses) have characteristic curves which more nearly approximate the motor curve and when properly selected both protect the motor at all loads and make available most of the motor capacity.
